Chargement...
Recherche...
Aucune correspondance
Fonctions membres publiques |
Attributs publics |
Fonctions membres protégées |
Liste de tous les membres
Référence de la classe BasicTurnStrategy
Graphe d'héritage de BasicTurnStrategy:
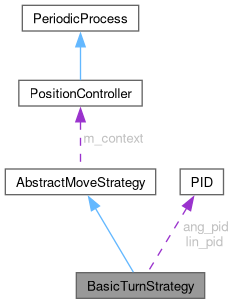
Graphe de collaboration de BasicTurnStrategy:
Fonctions membres publiques | |
| virtual | ~BasicTurnStrategy ()=default |
| Stratégie de mouvement basique. | |
Attributs publics | |
| PID | ang_pid = {} |
| PID | lin_pid = {} |
Fonctions membres protégées | |
| void | computeVelSetpoints (float timestep) override |
| Calcul les nouvelles vitesses désirer. | |
| bool | getPositionReached () override |
| Indique si la position désirée est atteinte. | |
 Fonctions membres protégées hérités de AbstractMoveStrategy Fonctions membres protégées hérités de AbstractMoveStrategy | |
| const Position & | getPosInput () const |
| Retourne la position du robot. | |
| const Position & | getPosSetpoint () const |
| Retourne la position à atteindre. | |
| void | setVelSetpoints (float linVelSetpoint, float angVelSetpoint) |
| Charge une nouvelle vitesse pour le robot. | |
| float | getLinVelKp () const |
| Retourne le coef proportionnel de vitesse linéaire. | |
| float | getAngVelKp () const |
| Retourne le coef proportionnel de vitesse angulaire. | |
| float | getLinVelMax () const |
| Retourne vitesse linéaire max. | |
| float | getAngVelMax () const |
| Retourne vitesse angulaire max. | |
| float | getLinPosThreshold () const |
| Retourne la précision cartésienne à atteindre. | |
| float | getAngPosThreshold () const |
| Retourne la précision angulaire à atteindre. | |
Membres hérités additionnels | |
| Attributs protégés hérités de AbstractMoveStrategy | |
| PositionController * | m_context |
Documentation des constructeurs et destructeur
◆ ~BasicTurnStrategy()
|
virtualdefault |
Stratégie de mouvement basique.
Stratégie développée afin de faire tourner le robot pour régler le PID.
Documentation des fonctions membres
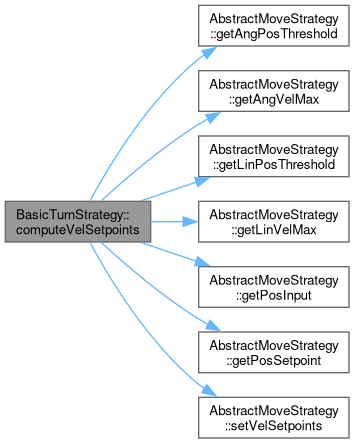
◆ computeVelSetpoints()
|
overrideprotectedvirtual |
Calcul les nouvelles vitesses désirer.
Méthode à implémenter pour réaliser une AbstractMoveStrategy. Cette méthode calcul à partir de la position du robot des vitesses à suivre pour le robot.
- Paramètres
-
timestep Temps depuis le dernier appel en secondes.
Implémente AbstractMoveStrategy.
Voici le graphe d'appel pour cette fonction :
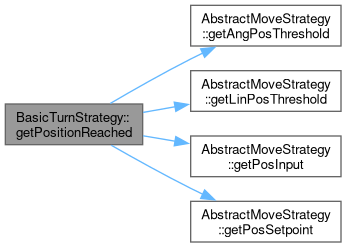
◆ getPositionReached()
|
overrideprotectedvirtual |
Indique si la position désirée est atteinte.
Calcul la distance entre la position du robot et la position désirée selon le mode de calcul de l'AbstractMoveStrategy.
- Renvoie
- true Si la position est atteinte.
- false Si la position n'est pas atteinte.
Implémente AbstractMoveStrategy.
Voici le graphe d'appel pour cette fonction :
La documentation de cette classe a été générée à partir des fichiers suivants :
- lib/BasicTurnStrategy/BasicTurnStrategy.h
- lib/BasicTurnStrategy/BasicTurnStrategy.cpp