Controle les moteurs.
Plus de détails...
#include <DifferentialController.h>
Controle les moteurs.
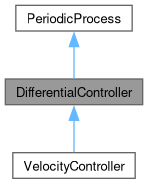
DifferentialController permet de controler les deux moteurs du robot à partir de l'odométrie et d'un PID.
◆ getAngOutput()
| float DifferentialController::getAngOutput |
( |
| ) |
const |
|
inline |
Retour la commande angulaire actuel.
- Renvoie
- float Commande angulaire en rad/s
◆ getAngSetpoint()
| float DifferentialController::getAngSetpoint |
( |
| ) |
const |
|
inline |
Retourne la vitesse demandée.
- Renvoie
- float Vitesse angulaire en rad/s.
◆ getAxleTrack()
| float DifferentialController::getAxleTrack |
( |
| ) |
const |
|
inline |
Retourne l'entraxe.
- Renvoie
- Entraxe en mm.
◆ getLinOutput()
| float DifferentialController::getLinOutput |
( |
| ) |
const |
|
inline |
Retour la commande linéaire actuel.
- Renvoie
- float Commande linéaire en mm/s
◆ getLinSetpoint()
| float DifferentialController::getLinSetpoint |
( |
| ) |
const |
|
inline |
Retourne la vitesse demandée.
- Renvoie
- float Vitesse linéaire en mm/s.
◆ onProcessDisabling()
| void DifferentialController::onProcessDisabling |
( |
| ) |
|
|
protectedvirtual |
Méthode exécutée à la désactivation du PeriodicProcess.
Méthode à implémenter si votre class nécessite des actions à sa déactivation.
Réimplémentée à partir de PeriodicProcess.
◆ onProcessEnabling()
| void DifferentialController::onProcessEnabling |
( |
| ) |
|
|
protectedvirtual |
◆ process()
| void DifferentialController::process |
( |
float | timestep | ) |
|
|
protectedvirtual |
◆ setAxleTrack()
| void DifferentialController::setAxleTrack |
( |
float | axleTrack | ) |
|
Charge l'entraxe.
Charge l'entraxe entre les deux roues du robot. Attention: cette entraxe est différente que celle du de l'odométrie.
- Paramètres
-
◆ setInputs()
| void DifferentialController::setInputs |
( |
float | linInput, |
|
|
float | angInput ) |
|
inline |
Charge les vitesses actuel.
Charge les vitesses instantanées du robot pour l'asservissemeent.
- Paramètres
-
| linInput | Vitesse linéaire en mm/s. |
| angInput | Vitesse angulaire en rad/s. |
◆ setPID()
| void DifferentialController::setPID |
( |
PID & | linPID, |
|
|
PID & | angPID ) |
|
inline |
Charge l'asservissement.
Charge les pointeurs PID pour l'asservissement de DifferentialController.
- Paramètres
-
| linPID | Asservissement linéaire. |
| angPID | Asservissement angulaire. |
◆ setSetpoints()
| void DifferentialController::setSetpoints |
( |
float | linSetpoint, |
|
|
float | angSetpoint ) |
|
inline |
Charge les vitesses désirées.
Charge la vitesse désirée par l'utilisation.
- Paramètres
-
| linSetpoint | Vitesse linéaire en mm/s. |
| angSetpoint | Vitesse angulaire en rad/s. |
◆ setWheels()
| void DifferentialController::setWheels |
( |
AbstractMotor & | leftWheel, |
|
|
AbstractMotor & | rightWheel ) |
|
inline |
Charge les moteurs.
Charge les pointeurs de AbstractMotor du DifferentialController.
- Paramètres
-
| leftWheel | Roue gauche (AbstractMotor). |
| rightWheel | Roue droite (AbstractMotor). |
◆ m_angInput
| float DifferentialController::m_angInput |
|
protected |
Vitesse angulaire actuel du robot.
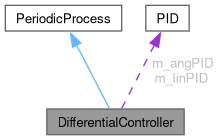
◆ m_angPID
| PID* DifferentialController::m_angPID |
|
protected |
Pointeur de l'asservissement angulaire.
◆ m_angSetpoint
| float DifferentialController::m_angSetpoint |
|
protected |
Vitesse angulaire demandée (en rad/s).
◆ m_angVelOutput
| float DifferentialController::m_angVelOutput |
|
protected |
Vitesse angiulaire asservie.
◆ m_axleTrack
| float DifferentialController::m_axleTrack |
|
protected |
Entraxe entre les deux roues motrices du robot (en mm).
◆ m_leftWheel
| AbstractMotor* DifferentialController::m_leftWheel |
|
protected |
Pointeur du moteur gauche (AbstractMotor).
◆ m_linInput
| float DifferentialController::m_linInput |
|
protected |
Vitesse linéaire actuel du robot.
◆ m_linPID
| PID* DifferentialController::m_linPID |
|
protected |
Pointeur de l'asservissement linéaire.
◆ m_linSetpoint
| float DifferentialController::m_linSetpoint |
|
protected |
Vitesse linéaire demandée (en mm/s).
◆ m_linVelOutput
| float DifferentialController::m_linVelOutput |
|
protected |
Vitesse linéaire asservie.
◆ m_rightWheel
| AbstractMotor* DifferentialController::m_rightWheel |
|
protected |
Pointeur du moteur droit (AbstractMotor).
La documentation de cette classe a été générée à partir des fichiers suivants :
 Fonctions membres publiques hérités de PeriodicProcess
Fonctions membres publiques hérités de PeriodicProcess

